Overview
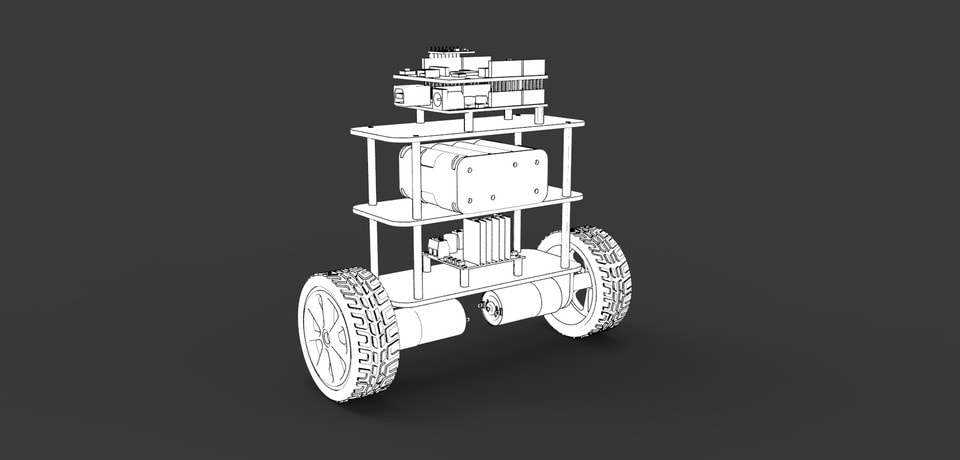
This project involved the complete design and development of a two-wheeled self-balancing robot, integrating mechanical design, electronics, and control systems programming for real-time orientation tracking and stability.
Areas of Focus
- Control Systems: PID control algorithm implementation for real-time balance correction
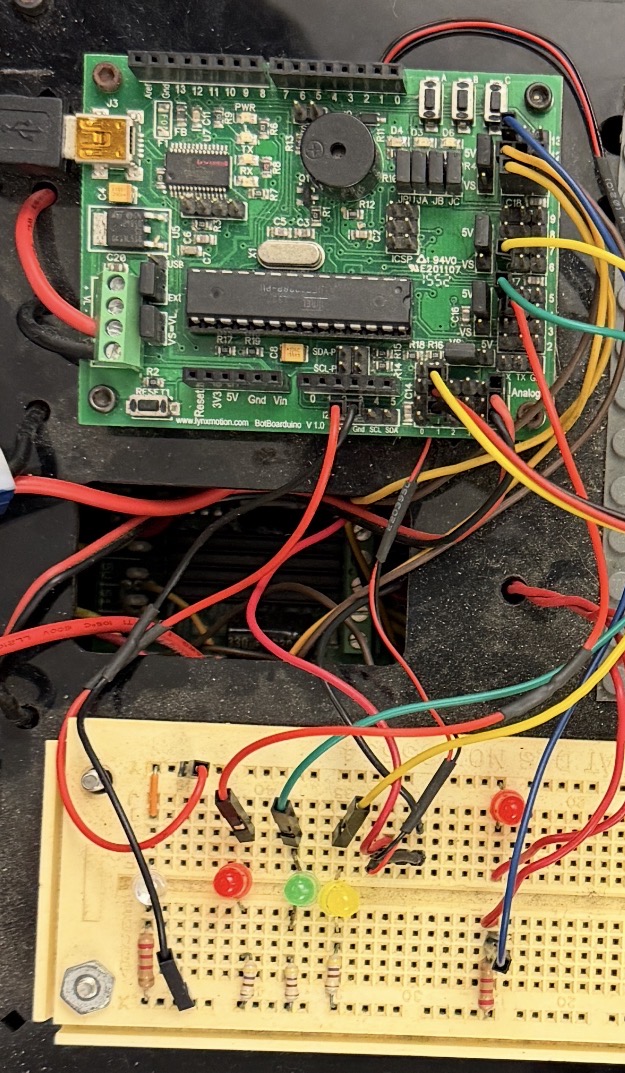
- Embedded Programming: STM32 microcontroller programming in C++ for sensor data processing
- Sensor Integration: IMU calibration and gyroscope/accelerometer data fusion
- Mechanical Design: Chassis design for optimal weight distribution and stability
- Motor Control: DC motor driver integration and PWM signal generation
Overview
Designed a automated, secure garage door opener based on Bluetooth Low Energy (BLE) proximity detection, eliminating the need for a manual remote and enhancing user convenience.
Areas of Focus
- Wireless Communication: Bluetooth Low Energy protocol implementation and optimization
- Security Systems: Encrypted authentication and proximity-based access control
- Automation Logic: Smart proximity detection algorithms and fail-safe mechanisms
Overview
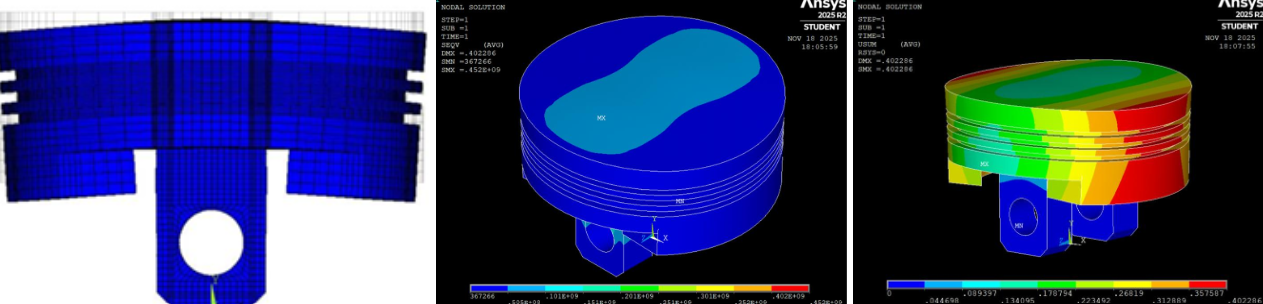
Conducted a comprehensive structural analysis and design optimization of a high-performance race car piston using ANSYS Mechanical APDL. The project focused on minimizing mass while maintaining structural integrity under extreme mechanical loads.
Areas of Focus
- Finite Element Analysis: Static structural and inertial analysis using ANSYS Mechanical APDL
- Design Optimization: Implemented the Conjugate Gradient Method for iterative mass reduction
- Structural Integrity: Validated design against yield strength and deflection constraints for Steel AISI 1045